|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R18 ESP32-CAM R20 mail2code >>> R19 Omniwheel-Robot im Koffer - KonstruktionDas Video zu R19Bemerkungen zu R19
Die Idee, einen Raspberry Pi in einem Koffer als Laptop zu verbauen hatte ich schon länger. Dann noch vier Räder einbauen und fertig ist Rover R19. Die so entstandene Programmierstation soll mir das Erstellen von Programmbeispielen meiner Serie zu Physical Computing erleichtern. Bau der MechanikFür die Bauanleitung verzichte ich mal auf die Angabe der Abmessungen, der Roboter ist so Pi mal Daumen entstanden und ich möchte nur eine kleine Anregung geben, wie ihr euren eigenen Koffer-Roboter bauen könnt. Einen etwas größeren Koffer zu nehmen ist nie verkehrt, denn zusätzlichen Platz kann man immer brauchen, da die Möglichkeiten, welcher der Raspberry Pi bietet, nahezu grenzenlos sind.
In den Koffer mit den Außenabmessungen 32x7.5x21.5cm müssen Aussparungen geschnitten und gebohrt werden. Für die Räder auf der Unterseite.... 
...und auf der Oberseite für die ausklappbare Kamera und an der Stelle, an welcher der Raspberry Pi verschraubt ist. Die Öffnung beim Raspberry Pi 4 soll die WLAN Verbindung verbessern. Die Seitenflächen des Koffers sind zwar nicht aus Alu, sondern aud Presspappe und Kunststoff, sorgen aber dafür, dass die Signalstärke spürbar abnimmt. Servos, Bildschirm und Raspberry Pi sind verschraubt, die Kabel, Taster und LEDs mit Heißkleber befestigt. Teileliste:Durch den Kauf von Bauteilen über die von mir angegebenen Affiliate-Partnerlinks in der Tabelle (oder in den Bannern auf meinen Seiten) unterstützt ihr meine Projekte - vielen Dank! Die Links anzuklicken bedeutet allerdings keinen Kaufzwang - völlig ungezwungenes Stöbern ist möglich ;-) Meine frei zugängliche Bildungsplattform ohne einzukaufen mit Hilfe einer Spende oder als Patreon zu unterstützen, geht natürlich auch. Vielen Dank an alle, die mir bereits einen Obolus haben zukommen lassen!
Elektronik
Die Elektronik basiert auf 4 Servos für kontinuierliche Rotation, an denen Omniwheels befestigt sind. 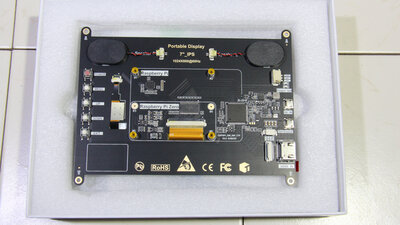
Der 18cm (7 Zoll) Touchscreen mit einer Auflösung von 1024x600 Pixeln verfügt über eine HDMI Schnittstelle, über die auch der Ton hin zu den beiden kleinen Lautsprechern übertragen wird. Die Touchfunktion wird über USB angeschlossen. 
Zur Energieversorgung verwende ich zwei Powerbanks, die jeweils 2A Strom liefern können. Eine Powerbank versorgt den Rasperry Pi 4 und den Touchscreen mit elektrischer Energie (die 2A reichen gerade so), die zweite Powerbank füttert die Servos. Die Tastatur/Touchpad Kombination ist per Bluetooth mit dem Raspberry Pi verbunden. 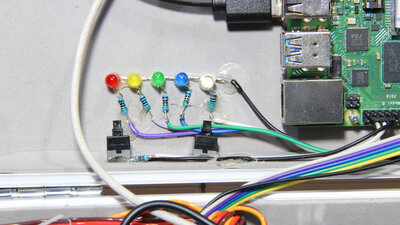
Fünf LEDs und zwei Tastschalter erlauben es, auf die Schnelle ein paar Softwarebeispiele zu "Physical Computing" zu schreiben und zu prüfen, ob alles so funktioniert wie erdacht. 
Das Raspberry Kameramodul ist an einem fünften Servo befestigt und kann somit ausgeklappt werden, um auch bei geschlossenem Kofferdeckel Bilder im Robotermodus übertraqen zu können. 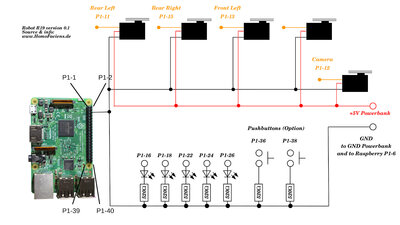
Schaltplan Software / DownloadDer Schaltplan und die Python-Skripts zur Ansteuerung des Roboters per Browserinterface sind im Download-Paket (430kb) enthalten. Eine genauere Beschreibung, wie die einzelnen Skripts arbeiten und wie der Webserver konfiguriert sein muss, gibt's in den Kapiteln zu Physical Computing nachzulesen.TestfahrtenWelche Roboter zur Zeit gesteuert werden können, seht ihr auf der Übersichtsseite meines RoboSpatiums.<<< R18 ESP32-CAM R20 mail2code >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|